![]()

 AnyBody 應(yīng)用案例
AnyBody 應(yīng)用案例
實測(動作捕捉)和制作模型的比較
- ① 概要
-
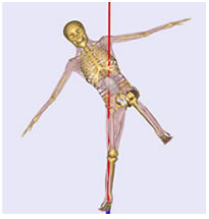
單腳站立是指一只腳浮在空中的姿勢。單腳懸空會導(dǎo)致平衡不穩(wěn)定,為了不失去平衡,得有效調(diào)用并使用核心肌肉。
AnyBody中導(dǎo)入了肌肉骨骼建模的Mannequin,可以讓Mannequin模仿人類的動作,解析人體的負(fù)擔(dān)。
使用動作捕捉的模型可以簡單地解析現(xiàn)實的動作,但是每次都需要準(zhǔn)備大規(guī)模的測量系統(tǒng),而且測量的結(jié)果是特定被測者當(dāng)時的固有動作,所以結(jié)果數(shù)據(jù)沒有什么活用的方法。
另一方面,使用Driver驅(qū)動模型的動作全部用參數(shù)設(shè)定,所以可以根據(jù)各自的目的進行參數(shù)研究(例:減少對人體的負(fù)擔(dān)的條件)。當(dāng)然,只要合理Driver驅(qū)動因素,模型的分析結(jié)果與使用動作捕捉的模型的分析結(jié)果相同。但是,步行/行走等復(fù)雜的動作很難使用Driver驅(qū)動來設(shè)定。
該模型中沒有使用動捕數(shù)據(jù),僅由Driver來驅(qū)動了人體模型的平衡。 僅由Driver驅(qū)動的模型還可以進行參數(shù)研究。
① 創(chuàng)建模型
■ 用動作捕捉制作模型
AnyBody會計算出合適的體節(jié)長度和關(guān)節(jié)角度來模仿Mannequin的動作,然后進行逆動力學(xué)分析。。
【沒有測力臺的情況】
在采集動作的時候,最好是使用測力臺來獲取真實數(shù)據(jù),但是,如果沒有測力臺,我們就可以使用AnyBody的地面反力推算功能GRF來考慮地面反力。下面比較了GRF和測力臺實測數(shù)據(jù)。同樣的動作,左邊的數(shù)據(jù)是測力臺得到的地面反力,右邊的數(shù)據(jù)是使用推算地面反力的功能。

視頻1 CoP
左:實測CoP 右:推算CoP
CoP是Center of Pressure的意思

以初始的關(guān)節(jié)角為模型,設(shè)定成單腳站立。設(shè)定模型參數(shù),使其成為自主單腳站立的狀態(tài)。 本次設(shè)定的是重心不動,單靠右腳腳踝微動來平衡身體。 這個模型可以使用前述的地面反力推算功能。 使用地面反力推算功能計算地面反力,參數(shù)研究的結(jié)果也可以反映地面反力的變化(大小和CoP的位置等)。
數(shù)據(jù):
軸心:右腳
傾斜的角度:初始角度為40度左右
傾斜的速度:毎秒20度左右
重力:9.81 m/s2
動捕和Driver模型的比較

上:使用動捕的模型
下:使用Driver創(chuàng)建的模型

雖然使用Driver驅(qū)動器的模型數(shù)值略高,但使用Driver驅(qū)動器也能確認(rèn)對身體的負(fù)擔(dān)變化情況。

■ 研究概要
把模型的重心位置作為參數(shù)進行了分析。< br > 通過參數(shù)研究找到肌肉負(fù)荷減小的條件。
數(shù)據(jù):
坐標(biāo)的原點:(右腳)腳后跟
重心的位置(前后方向):從原點向前6, 8, 10, 12, 14 cm的5種
重心的位置(左右方向):從原點向右-10, -5, 0, 5, 10 cm的5種
■ 結(jié)果
重心離腳跟越遠(yuǎn),對右腳(軸足)的負(fù)擔(dān)就越大。

④ 總結(jié)
■ 使用動作捕捉建立模型的好處
1. 因為是以實際的動作為基礎(chǔ),所以力學(xué)分析結(jié)果準(zhǔn)確度較高。
■ 使用Driver驅(qū)動器的好處
1. 模仿實際動作并進行合適動作的設(shè)定,也可以得到接近實測的結(jié)果。
2. 不進行實際測定,通過分析模型的參數(shù)就能解決問題。
※開發(fā)商:AnyBody Technology A/S
Copyright © 2013 Terrabyte (Shanghai) Co.,Ltd.